MOUVEMENTS RECTILIGNES (CINEMATIQUE)
PARAMETRES CINEMATIQUES DU MOUVEMENT
Repère d’espace, repère de temps
L’état de mouvement ou de repos est relatif. Nous pouvons par exemple nous déplacer sans marcher sur un escalier roulant; de même une personne assise dans un train est immobile par rapport à son compagnon de voyage mais en mouvement par rapport à un observateur debout sur le quai.
Le référentiel étant choisi, plusieurs repères d’espaces peuvent lui être associés.
· Un repère d’espace est l’association d’un point O nommé origine et d’une base formée de trois vecteurs.
Le repère cartésien noté (![]() ,
,![]() ) est le plus utilisé.
) est le plus utilisé.
·
La
connaissance d’un repère de temps est également nécessaire. Chaque
instant d’observation est appelé date et est noté t. L’instant d’origine est
dans la plupart des cas, l’instant du début de l’expérience.
Trajectoire
La trajectoire d’un système est l’ensemble des positions successives qu’il
occupe au cours
de son mouvement.
On
distingue trois grands types de trajectoire :
— si la trajectoire est une ligne droite, le mouvement est rectiligne ;
— si la trajectoire est un cercle, le mouvement est circulaire ;
— si la trajectoire est une courbe, le mouvement est curviligne.
Exemple:
Le mouvement d’un mobile est défini par:
Trouvons l’équation cartésienne de la trajectoire de ce mouvement.
![]()
![]()
=>y=2x+3 qui est l’équation de la trajectoire. C’est une droite.
Vecteur position et vecteur déplacement
Vecteur position
La position d’un mobile M est déterminée à chaque instant par son vecteur position
Le
mouvement d’un mobile se déplaçant dans l’espace peut être décrit dans un
repère cartésien
(![]() ,
,![]() )
)
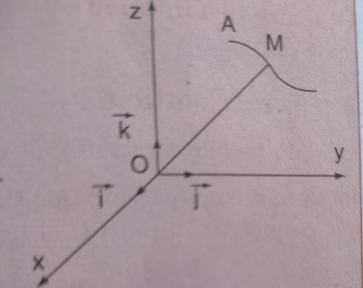
Le vecteur position est alors
![]() =x
=x![]()
x,y et z sont les coordonnées cartésiennes du point M.
Soit M1, la position du mobile à la date t1 et M2 la position à la date t2,
Le vecteur ![]() est appelé vecteur
déplacement de ce mobile au cours de l’intervalle de temps Δt =t2
– t1
est appelé vecteur
déplacement de ce mobile au cours de l’intervalle de temps Δt =t2
– t1
![]() -
-![]()
Le vecteur déplacement correspondant à la variation du vecteur position.
Si
dans un référentiel, la trajectoire du point M est connue, on peut repérer le
point par la mesure de l’arc ![]() s=mes AM est appelé abscisse
curviligne
s=mes AM est appelé abscisse
curviligne
Ce
vecteur a pour :
⎯ direction : la droite
(MM’) ;
⎯ sens : celui du
mouvement (de M vers M’) ;
⎯ valeur : la distance
entre M et M’.
Vecteur deplacement
Lorsqu’un système se déplace entre deux positions appelées M et M’, on peut définir un vecteur déplacement
Vitesse moyenne
La vitesse moyenne d’un corps entre deux instants t1 et t2 correspond à la distance parcourue par ce corps, divisée par la durée de parcours t2-t1.
Le
vecteur vitesse moyenne ![]() moy est le quotient du
vecteur déplacement du mobile à l’intervalle de temps correspondant.
moy est le quotient du
vecteur déplacement du mobile à l’intervalle de temps correspondant.
Le
vecteur vitesse moyenne a pour :
⎯ direction : la droite
(MM’) ;
⎯ sens : celui du
mouvement (de M vers M’) ;
⎯ valeur :
![]()
![]()
Unité: le mètre par
seconde(m/s) 1m/s=3,6km/h
Le vecteur vitesse moyenne est indépendant de la trajectoire du système entre M
et M’, et il est colinéaire au vecteur déplacement ![]()
Exemple
:
Nous pouvons voir que le vecteur vitesse moyenne est colinéaire à
Distance entre M et M’ : 𝑀𝑀′ = 30 - 5 = 25 m
Durée du parcours : 𝛥𝑡 = 10 - 1 = 9 𝑠
Vitesse moyenne : 𝑣𝑚𝑜𝑦 = 25:9 ≈
2,78 𝑚/𝑠
Vecteur vitesse instantanée
Le vecteur vitesse instantanée ![]() est la limite vers
laquelle tend le vecteur vitesse moyenne quand l’intervalle de temps Δt
devient très petit.
est la limite vers
laquelle tend le vecteur vitesse moyenne quand l’intervalle de temps Δt
devient très petit.
![]() =
=![]() =
=  =
= ![]()
Le
vecteur vitesse instantanée d’un mobile à un instant t est la dérivée par
rapport au temps du vecteur position ![]() à cet instant.
à cet instant.
Dans un repère cartésien, le vecteur vitesse s’écrit:
![]() =
= ![]()
![]()
![]()
![]() ,
,![]()
![]()
![]()
La vitesse linéaire instantanée correspond à la dérivée par rapport au temps d’abscisse curviligne s:

Le vecteur
vitesse instantanée ![]() en un point de la
trajectoire du système est une vitesse moyenne calculée sur un intervalle de
temps très court.
en un point de la
trajectoire du système est une vitesse moyenne calculée sur un intervalle de
temps très court.
Le sens et la direction sont confondus avec la tangente en ce point.
Le vecteur vitesse instantanée 𝑣 a pour :
⎯ direction : la
tangente de la trajectoire ;
⎯ sens : celui du
mouvement ;
⎯ valeur : v=ds/dt
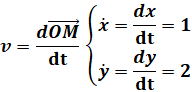
Exemple: Le mouvement d’un mobile est défini par:
![]()
Calculons la vitesse de ce mobile:
Vecteur accélération
L’accélération d’un mobile caractérise la variation de sa vitesse.
Le
vecteur accélération moyenne entre deux instants t1 et t2 est:![]()
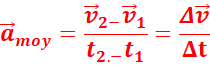
Unité: le mètre par seconde carré (m/s2)
Le vecteur accélération instantanée est donné par la relation:
![]()

Le vecteur accélération instantanée est donc la dérivée seconde par rapport au temps du vecteur position.
Dans
un repère cartésien
(O,![]() ), le vecteur vitesse
s’écrit:
), le vecteur vitesse
s’écrit:
![]()
![]()
![]()
![]()
![]()
![]() ,
,![]()

![]()
![]()
Exemple:
Le mouvement d’un mobile est défini par:
![]()
Calculons l’accélération de ce mobile:

TYPES DE MOUVEMENTS
Mouvement rectiligne uniforme
Un mouvement rectiligne uniforme est un mouvement pour lequel:
-la trajectoire est une droite
- la valeur de la vitesse est constante (v=cte) donc l’accélération est nulle(a=0).
Equation horaire du mouvement :
x=vt +x0
x (en mètres) est l’abscisse à l’instant t (en secondes)
x0(en mètres) est l’abscisse à l’instant t=0 (en secondes)
v (en mètres par seconde) est la vitesse
Mouvement rectiligne uniformément varié
Un mouvement rectiligne uniformément varié est un mouvement pour lequel:
-la trajectoire est une droite
- la vitesse varie de manière uniforme avec le temps (l’accélération est nulle).
Equations horaires:
x (en mètres) est l’abscisse à l’instant t (en secondes)
x0(en mètres) est l’abscisse à l’instant t=0 (en secondes)
v
(en mètres par seconde) est la vitesse
Relation indépendante du temps entre les vitesses et les abscisses:
![]() -
-![]()
Le mouvement est uniformément varié:
- Mouvement rectiligne uniformément accéléré si le vecteur vitesse augmente.
- Mouvement rectiligne uniformément décéléré si le vecteur vitesse diminue.
Remarques:
a- Au cours d’un mouvement rectiligne uniforme, la distance entre les points ne change pas au cours du temps car la vitesse reste constante. Par ailleurs, la direction de 𝑣 ne change pas.
b-Au cours d’un mouvement rectiligne accéléré,
la distance entre les points augmente au cours du temps car la vitesse augmente
progressivement. En revanche, la direction de 𝑣 ne change pas.
c-Au cours d’un mouvement rectiligne décéléré, la distance entre les points
diminue au cours du temps car la vitesse diminue progressivement. En revanche,
la direction de 𝑣 ne change pas jusqu’à
l’arrêt du système.
EXERCICES.
EXERCICE I:
Les équations paramétriques d’un mobile sont:

1. Le mouvement du mobile est-il plan? Pourquoi?
2. Déterminer le module des vecteurs vitesse et accélération à l’instant t=0
3. Quelle est l’équation de sa trajectoire?
EXERCICE II
L’équation horaire d’un mobile en mouvement rectiligne sur un axe x’ox est:
x(t)=3t-1 (m)
1. Déterminer le module du vecteur vitesse de ce mobile
2.Calculer la vitesse moyenne de ce mobile entre les instants t1=1s et t2=2s
3.Déduire l’accélération moyenne.
4.calculer V1 et V2 et comparer à Vmoy
EXERCICE III:
1. Un mobile, animé d’un mouvement rectiligne uniforme, a déjà parcouru 20 m à la date 0 (instant initial). Sa vitesse est de 60 m/s.
a) Ecrire l’équation horaire de son mouvement.
b) Quelle distance aura-t-il parcouru après 1h?
2. Un mobile initialement au repos, parcourt une distance de 12 km en 20mn à vitesse constante. Calculer cette vitesse.
EXERCICE III:
On donne les équations horaires d’un mouvement décrit par un mobile M.
x= 5t2 +25t+15 (m)
v=10t+25 (m/s)
1. Quelle est la nature de ce mouvement?
2. a)Identifier l’accélération de ce mouvement?
b) Identifier la position initiale du mobile
c) Identifier la vitesse initiale du mobile
3. Un mobile en mouvement rectiligne uniformément varié maintient une accélération constante de 10 m/s2. A l’instant initial, le mobile a déjà parcouru 25 m avec une vitesse initiale de 20m/s.
3.1 Ecrire les équations horaires du mouvement de ce mobile.
3.2 Calculer sa vitesse après 100 m de parcours
EXERCICE V:
Une automobile roule à la vitesse de 90km/h, le conducteur apercevant un obstacle freine. La vitesse diminue de 5m/s pendant chaque seconde.
1. Exprimer V en m/s
2. Calculer:
a)La vitesse de l’automobile 2s après le début de freinage
b) son accélération
EXERCICES VI:
Partant du point A (VA=0), un mobile en mouvement rectiligne acquiert une vitesse de 10 m/s après 25 m de parcours et arrive au point B avec une vitesse VB. Il parcourt ensuite 50m avec cette vitesse jusqu’au point C en mouvement uniforme. Il s’arrête à 125 m de son point de départ au point D. Le mouvement de cette phase est uniformément retardé.
1. Définir: mouvement rectiligne; trajectoire
2 .Calculer la durée totale du mouvement du mobile.
3 .Etablir les équations horaires des mouvements des trois phases
4 .Construire les diagrammes des espaces, des vitesses et des accélérations
Avez-vous un exercice à proposer
au Forum?Cliquez-ici
Merci de votre visite
Laissez un commentaire