PENDULE ELASTIQUE
&
Description
Un pendule élastique, ou système solide-ressort, est constitué d'un solide, de masse m, fixé à un ressort, de longueur initiale ℓ0 et de raideur K, dont l'autre extrémité est attachée à un point fixe.
Le solide, écarté de sa position initiale, puis abandonné à lui-même, effectue un mouvement oscillatoire linéaire autour de sa position d’équilibre. Le système solide-ressort constitue un oscillateur mécanique encore appelé pendule élastique (horizontal dans ce cas).
On distingue&:
-le pendule élastique horizontal
-le pendule élastique vertical
-le pendule élastique oblique.
&
Cas du pendule élastique horizontal
Sur un plan lisse on attache à l’extrémité d’un ressort de spires non jointives et de masse négligeable, un corps (S) de masse m, on l’écarte de sa position d’équilibre, et on le lâche sans vitesse initiale, le solide effectue donc un mouvement rectiligne oscillatoire.

Equation déférentielle du mouvement
Étudions ce système dynamiquement :
Le système étudié : (S)
Bilan des forces :
![]() : Le poids du corps
: Le poids du corps
![]() : La réaction du plan
: La réaction du plan
![]() : La tension du ressort
: La tension du ressort
Dans le référentiel terrestre supposée galiléen on associe le repère (Ox), On applique la deuxième loi de Newton :
&
![]()
![]()
Projetons cette relation sur l’axe des x
![]()
Donc
![]()
On pose&:
![]()
L’équation devient&:
&
![]()
&
C’est une équation différentielle linéaire du second ordre car elle relie la variable x et sa dérivée seconde.
Sa solution s’écrit sous forme :
&
![]()
&
xm est l’amplitude maximale en mètres(m)
ω0 est la pulsation en radian par seconde(rad.s-1)
φ est la phase a l’origine en radian(rad)
xm, w0 et φ sont des constantes caractéristiques du mouvement.
&
Pulsation, amplitude et phase initiale
·&&&&&&&& Sa pulsation propre est&:

k en newton (N)
m en kilogramme (k)g
w0 en radians par seconde(rad.s-1)
·&&&&&&&& La fréquence propre de l’oscillateur est&:
![]() soit
soit ![]()
·&&&&&&& Sa période propre est&:
![]() soit
soit ![]()
![]() ne dépendent que des
paramètres caractérisant l’oscillateur (la masse m et la constante de raideur
k)&: c’est pourquoi ces grandeurs sont dites propres. Tout oscillateur
possède une fréquence propre et une période propre.
ne dépendent que des
paramètres caractérisant l’oscillateur (la masse m et la constante de raideur
k)&: c’est pourquoi ces grandeurs sont dites propres. Tout oscillateur
possède une fréquence propre et une période propre.
·&&&&&&&& L’amplitude xm des oscillations et la phase initiale φ sont déterminées à partir des conditions initiales.
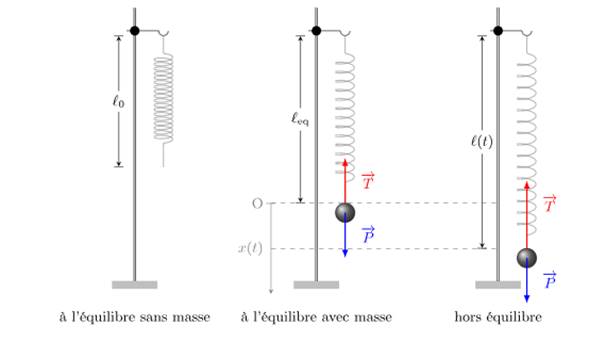
Cas du pendule élastique vertical
À l’extrémité libre d’un ressort de spires non jointives et de masse négligeable, on attache un corps (S) de masse m, le ressort s’allonge d’une distance ∆l0.
Pour la déterminer on étudie le système en équilibre :
&
A l’equilibre,
&
![]() avec
avec ![]()
&
![]()
&
Lorsqu’on ecarte la masse de sa position d’equilibre, la tension du ressort a un instant donnee est differente de sa valeur a l’equilibre&:
&
![]()
![]()
![]()
![]() avec
avec ![]()
&
En allongeant le corps (S) vers le bas, il effectue un mouvement oscillatoire, on suppose que l’air n’a aucun effet sur le mouvement de (S) :
d’apres le TCI&:
&
![]()
&
P - T= ma <=>mg -T=ma
<=>mg
– [kx +k(leq-l0)]![]() =ma
=ma
<=>mg
– kx - k(leq-l0)![]() =ma
=ma
Or d’apres la condition d’equilibre&: mg= k(leq-l0)
Il s’en suit&:
<=> – kx =ma
Sachant
que&: ![]()
![]()
On
a&: ![]()
&
On trouve une équation analogue a celle d’un pendule élastique horizontal.
&
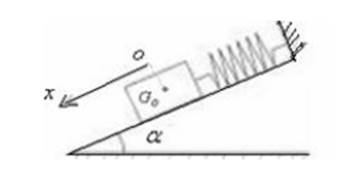
Cas du pendule élastique oblique
Dans un plan lisse incliné d’un angle α, on attache à l’extrémité d’un ressort de spires non jointives et de masse négligeables, un corps (S) de masse m, le ressort s’allonge donc d’une distance ∆l0, on la détermine en étudiant le système à l’équilibre :

A
l’équilibre,![]()
![]()
En projetant suivant l’axe des x&:
Psinα-T=0
Or T=kΔl0, Δl0 étant l’allongement du ressort
mgsinα=k Δl0
Maintenant on écarte le corps et on le lâche sans vitesse initiale, il effectue un mouvement oscillatoire.
&
Dans le repère (Gx), on applique le TCI&:
&
![]()
![]()
&
Psinα-T=m![]()
Psinα-k(Δl0
+ x )=m![]()
Psinα-k(Δl0)
-kx =m![]()
On a&:
-kx
=m![]() ou
ou ![]() +
+![]() =
=
&
Que le pendule soit horizontal, vertical ou oblique, la période des oscillations ne dépend que de la masse m du solide et de la raideur du ressort.
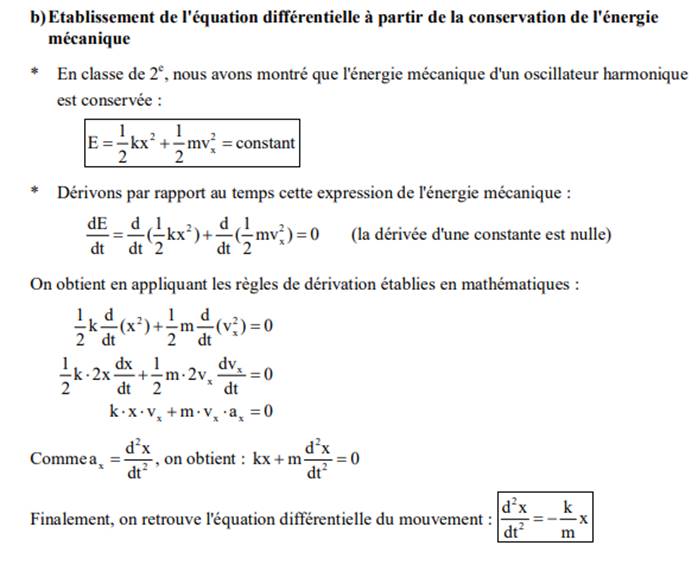
Etude énergétique d’un pendule élastique

E=constante
k en Nm-1
Xm en m
m en kg
E en joule
L’énergie mécanique d’un pendule élastique non amorti reste constante au cours des oscillations. Elle est proportionnelle au carré de l’amplitude.
&
EXERCICES
EXERCICE I&:
Un pendule élastique est constitué d’un solide de masse m=200 g fixé à l’extrémité mobile d’un ressort de raideur k=5 N.m-1. Il oscille autour de sa position d’équilibre avec a une amplitude de 5 cm.
A l’équilibre des dates, le centre d’inertie du solide occupe la position d’élongation maximale.
1.Calculer la pulsation propre ω0 du système oscillant, puis déduire la période propre et la fréquence propre se son mouvement.
2.Donner les équations horaires de la position et de la vitesse du centre d’inertie du solide.
3.Determiner la vitesse maximale du centre d’inertie du solide.
&
EXERCICE II&:
On considère un pendule élastique vertical constitué d'un ressort de constante de raideur k=20N/m et d'un corps solide de masse m=200g . On écarte le corps S verticalement vers le bas à partir de sa position d'équilibre d'une distance égale à 3cm et on le lâche sans vitesse initiale. A l'instant t=0 le corps passe de la position d'équilibre stable Go dans le sens positif.
&

&
1) Déterminer l'allongement du ressort à l'équilibre Δlo
2) Déterminer l'équation différentielle du mouvement.
3) Donner l'équation horaire du mouvement.
4) Déterminer la période propre du mouvement. On donne g=10N/kg.
&
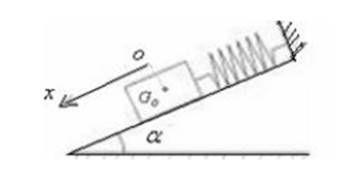
EXERCICE III :
Un pendule élastique est placé sur un plan incliné d'un angle a = 30o par rapport au plan horizontal. Le pendule élastique est constitué d'un ressort maintenue par un support fixe à l'une de ses extrémités alors que l'autre extrémité est liée à un corps solide de masse de masse m=200g . (voir schéma). Sachant que l'allongement du ressort à l'équilibre est : Δlo = 8cm
&
&
1)Déterminer l'allongement de ressort à l’équilibre.
2) On écarte le corps de sa position d'équilibre de 2cm selon la ligne de la grande pente vers le bas et on le lâche sans vitesse initiale.
a- Déterminer l'équation différentielle du mouvement.
b-Sachant que le corps passe à t=0 du point d’abscisse x=+1cm dans le sens positif. Déterminer l'équation horaire du mouvement. On donne : g=10N/kg
&
EXERCICE IV :
Un ressort à spires non jointives, parfaitement élastique et de masse négligeable est suspendu verticalement. L’une de ses extrémités est fixe. A l’autre est attache un solide (S) de masse m=500 g et de centre d’inertie G. la raideur du ressort est de 20 N.m-1. Les positions de G seront repérées par rapport à un axe vertical Ox. L’origine étant la position de G à l’équilibre.
1.Calculer l’allongement du ressort à l’équilibre.
2.On tire (S) verticalement vers le bas de 5 cm à partir de la position d’équilibre précédente et on le lâche sans vitesse initiale à la date t=0.
a-le solide (S) étant animé d’un mouvement de translation verticale, déterminer la nature du mouvement de G.
B-établir l’équation horaire de ce mouvement.
c-calculer la vitesse de G au passage en O.
On donne g=10 SI.
EXERCICE IV :
Votre lycée
vient de recevoir les matériels pour le laboratoire de physique. Un groupe
d’élèves de terminale C se donne pour objectif de caractériser un ressort de
constante de raideur&k&et un mobile de masse&m.
Ce groupe d’élèves réalise le schéma du montage de l’oscillateur élastique
horizontal sur banc à coussin d’air, représenté sur le document 1.
Les conditions initiales de travail sont :
• Abscisse initiale du centre d’inertie du mobile&x0=4,0cm ; -vitesse
initiale&v0=0,0&m/s.
L’expression&T=2π√mk&est conservée dans la calculatrice.
Au cours de la manipulation, les données obtenues sont exploitées et des
graphes tracés (documents 2 et 3). Le document 2 présente l’évolution de
l’abscisse x du centre d’inertie G du mobile au cours du temps, tandis que le
document 3 présente l’évolution de l’énergie potentielle élastique Epe du
système {mobile + ressort} au cours du temps. Deux élèves de ce groupe, étant
en désaccord sur la nature de l’oscillateur, s’accordent sur le fait que, quel
que soit sa nature, la période de l’oscillateur sera confondue à la période
propre d’un oscillateur idéal.
En exploitant les informations ci-dessus et à partir d’un raisonnement logique,
1. Départage les deux élèves.&
2. Prononce-toi sur les caractéristiques de cet oscillateur.&Extrait de
l‘ épreuve
zéro de physique Théorique au baccalauréat D 2025 Région du Nord-Ouest
&
Avez-vous un exercice à proposer
au Forum?Cliquez-ici
Merci de votre visite
Laissez un commentaire